
ABOUT ME

Robotics Engineer
PhD Candidate
Vehicle Autonomy and Intelligence Lab @ UNT
Full-Stack Autonomy
From perception to drive-by-wire.
Bridge-Builder
Translating complex theory into real-world application.
Systems Architect
Designing robust, scalable autonomous solutions.
Spatial Intelligence
Advancing the frontier of 3D mapping and navigation.
Research Leader
Driving innovation through cross-functional collaboration.
PROJECTS
![[CVPR 2026] Teaching Robots to Build 3D Worlds Together](/3dgsStreet-thumb.webp)
[CVPR 2026] Teaching Robots to Build 3D Worlds Together
A federated 3D Gaussian Splatting framework for decentralized multi-agent 3D reconstruction
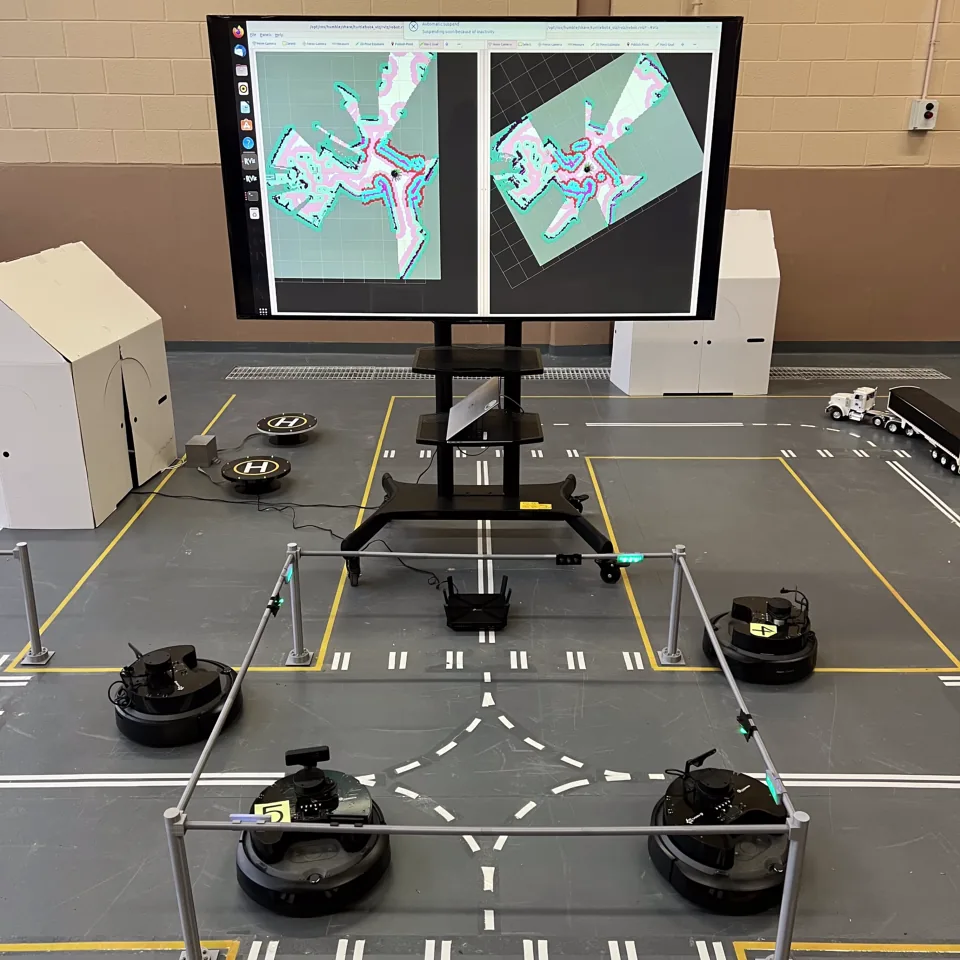
Multi-Robot Mapping & Navigation (🏆Best Paper Award)
A Holistic Approach for Collaborative Exploration

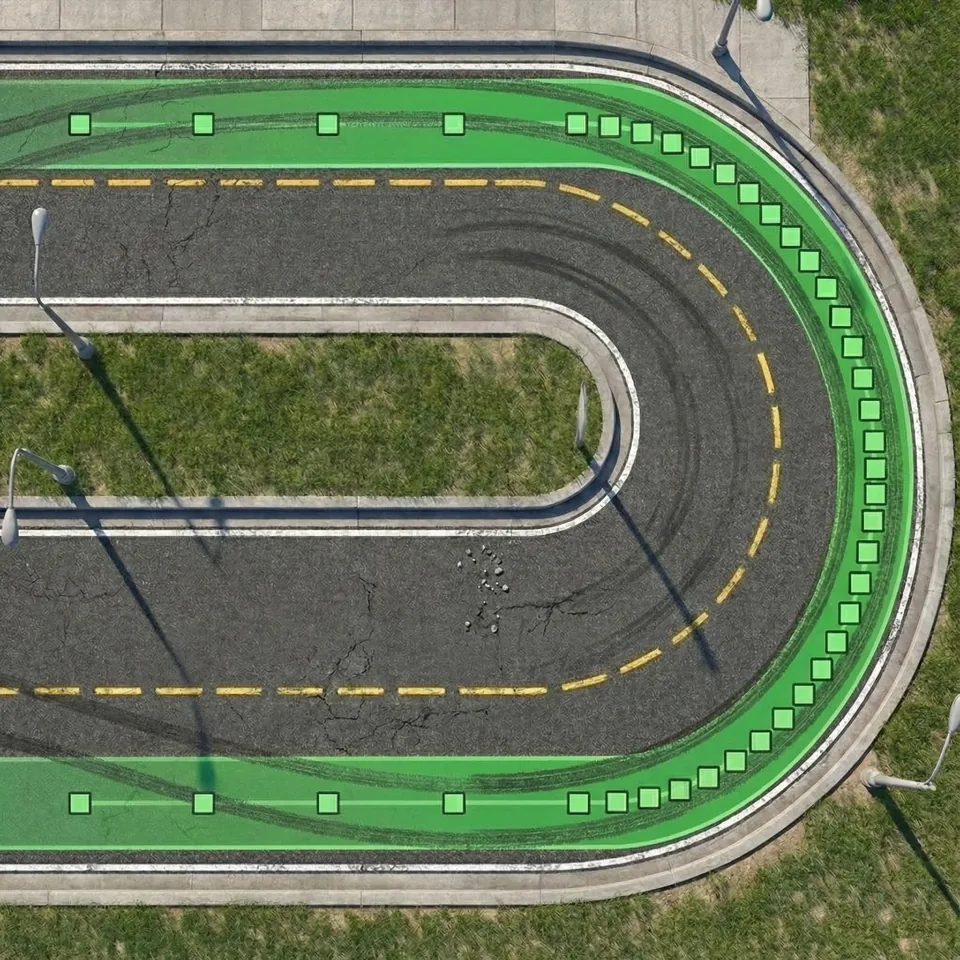
Motion Control for Autonomous Vehicle
Speed and Steering Controller for an autonomous cart
Motion Planning in Dynamic Environments
Developed a novel motion planning optimization technique that increased computational efficiency, enabling real-time trajectory execution on resource-constrained embedded platforms.

Helping Robots Find Their Way
The Challenge of "Sensory Confusion"

Robotic Manipulator Path Execution
Simulated Kinovarobotics manipulator in Gazebo and Controlled in ROS
TECHNICAL SKILLS
EDUCATION
Bachelor of Science: Electronics Engineering
Yazd University (2012 - 2016)
Master of Science: Mechatronics Engineering
Amirkabir University of Technology (AUT) (2016 - 2019) - Distinguished Graduate Award (Ranked 3rd of Class)
Doctor of Philosophy: Computer Science and Engineering
University of North Texas (UNT) Texas, USA (2022 - 2026)
INTERESTS

Robotics
Design, simulate, build robotic systems

Connected Autonomous Vehicles
Perception, Planning and Control for self-driving cars
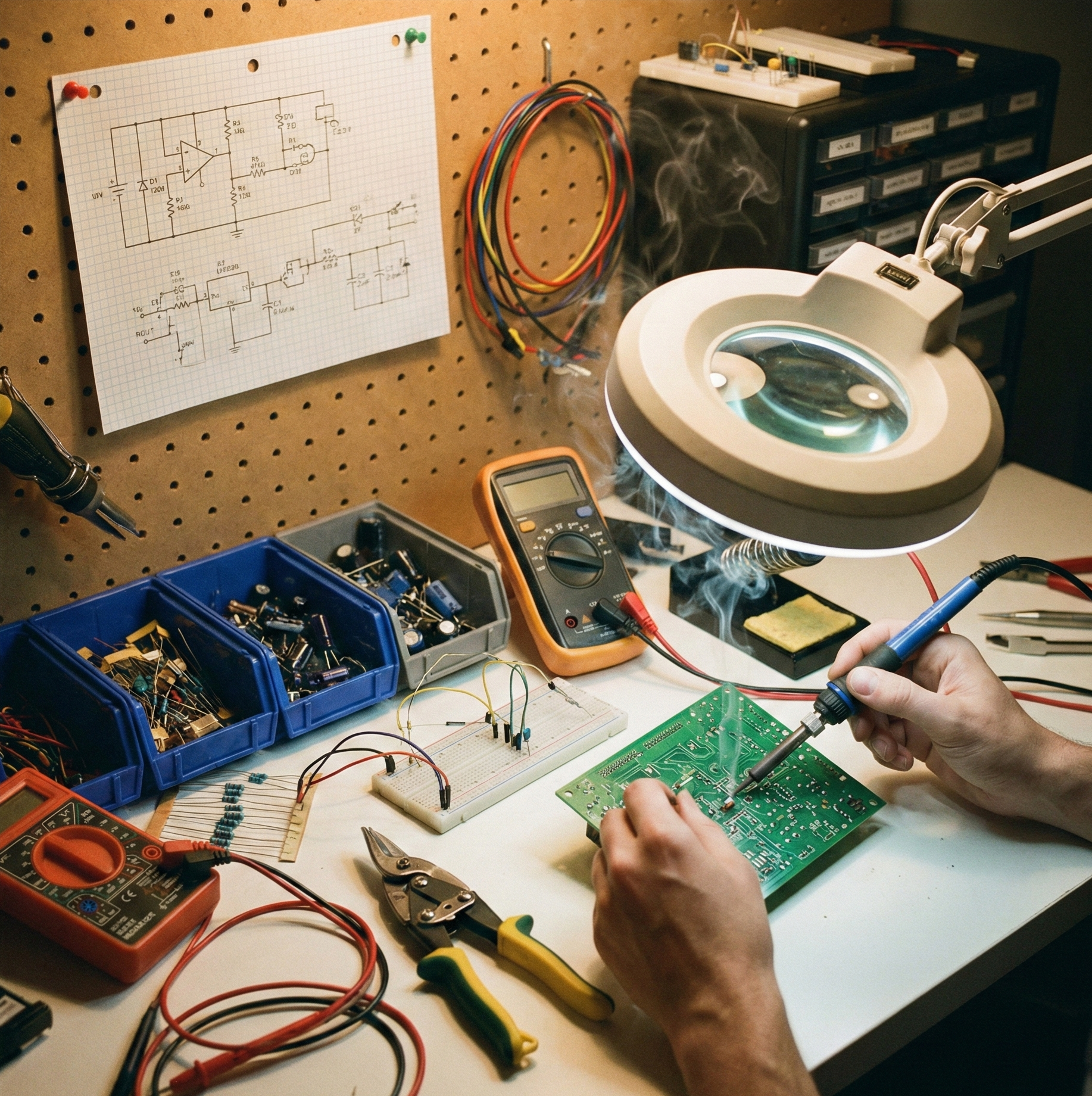
Electronics
Electronic circuits, Embedded systems, SCBs, etc.
