Project Overview
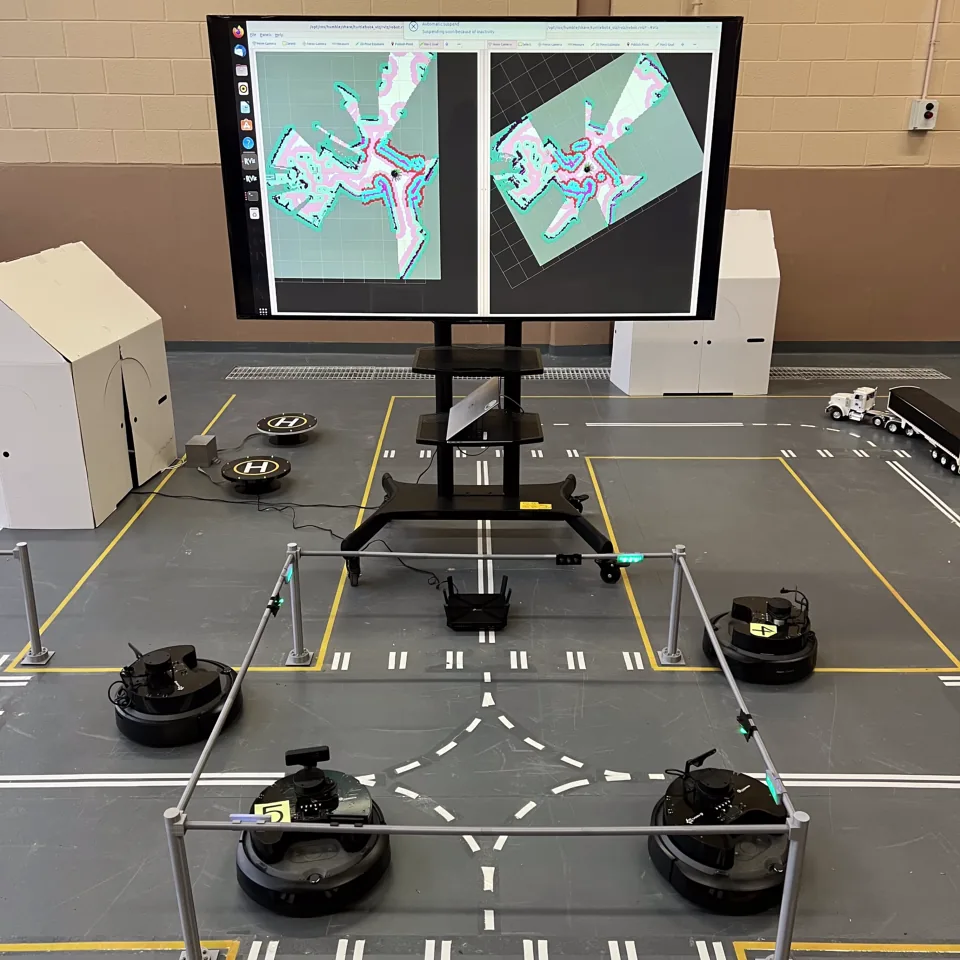
Simulated Kinova robotics manipulator in Gazebo and controlled in ROS. This project demonstrates advanced path planning and execution for robotic manipulators.
The system enables precise control of a robotic arm through complex trajectories, with real-time monitoring and feedback for accurate task execution.
Implementation Details
- Gazebo simulation environment setup
- ROS-based control system
- Path planning algorithms
- Real-time trajectory execution and monitoring
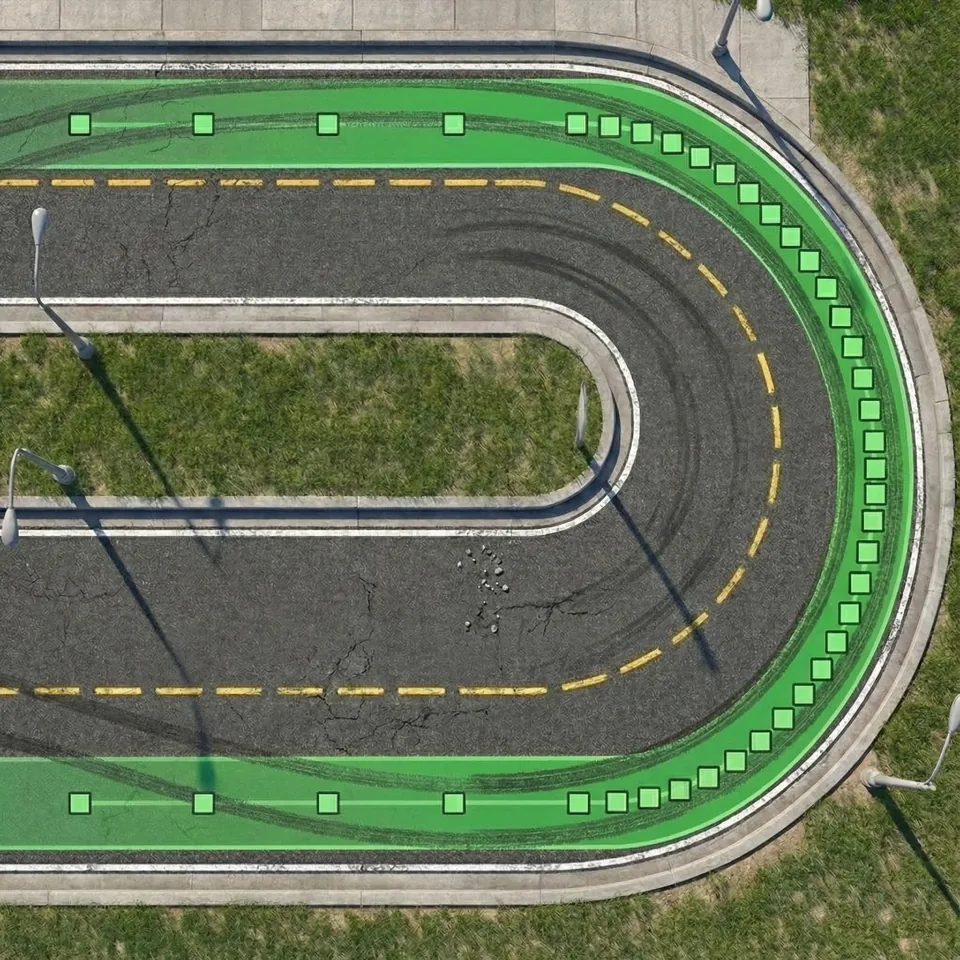
![[CVPR 2026] Teaching Robots to Build 3D Worlds Together](/3dgsStreet-thumb.webp)