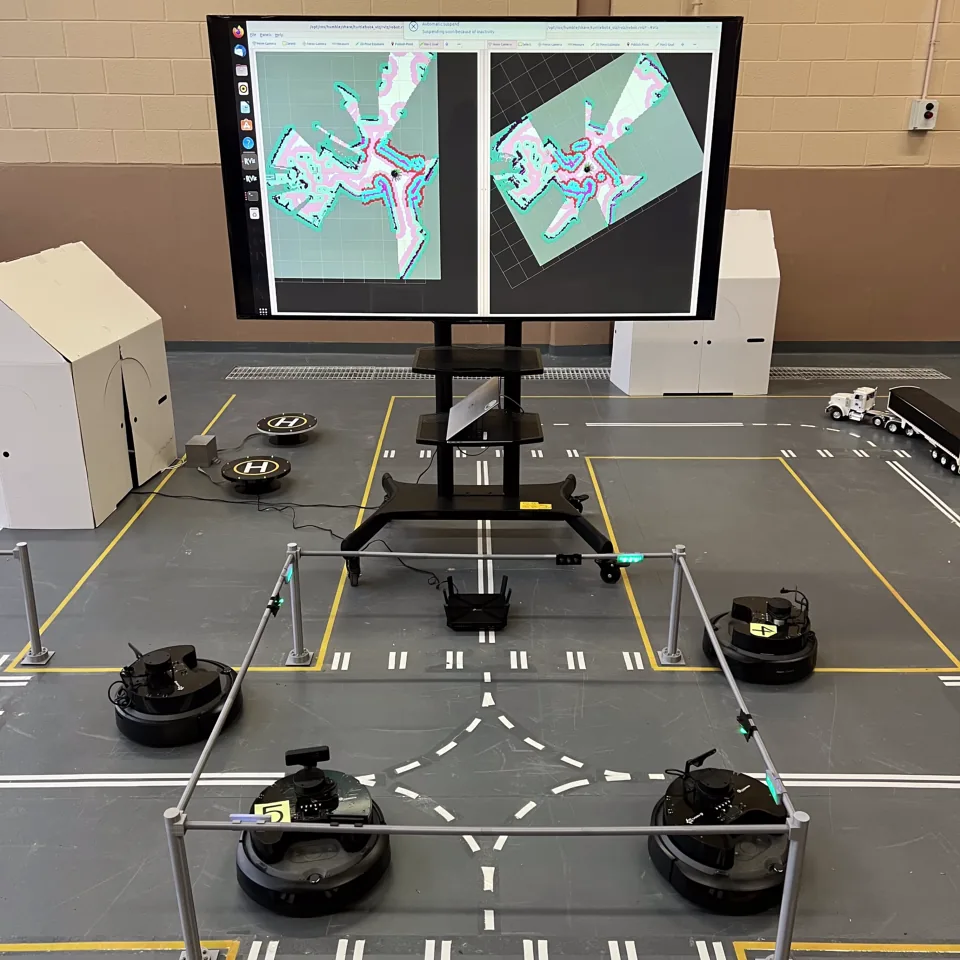
Navigating an empty road is simple; safely maneuvering through a chaotic environment filled with moving obstacles is a fundamental challenge for autonomous vehicles. This research focused on solving that problem without requiring a supercomputer in the trunk.
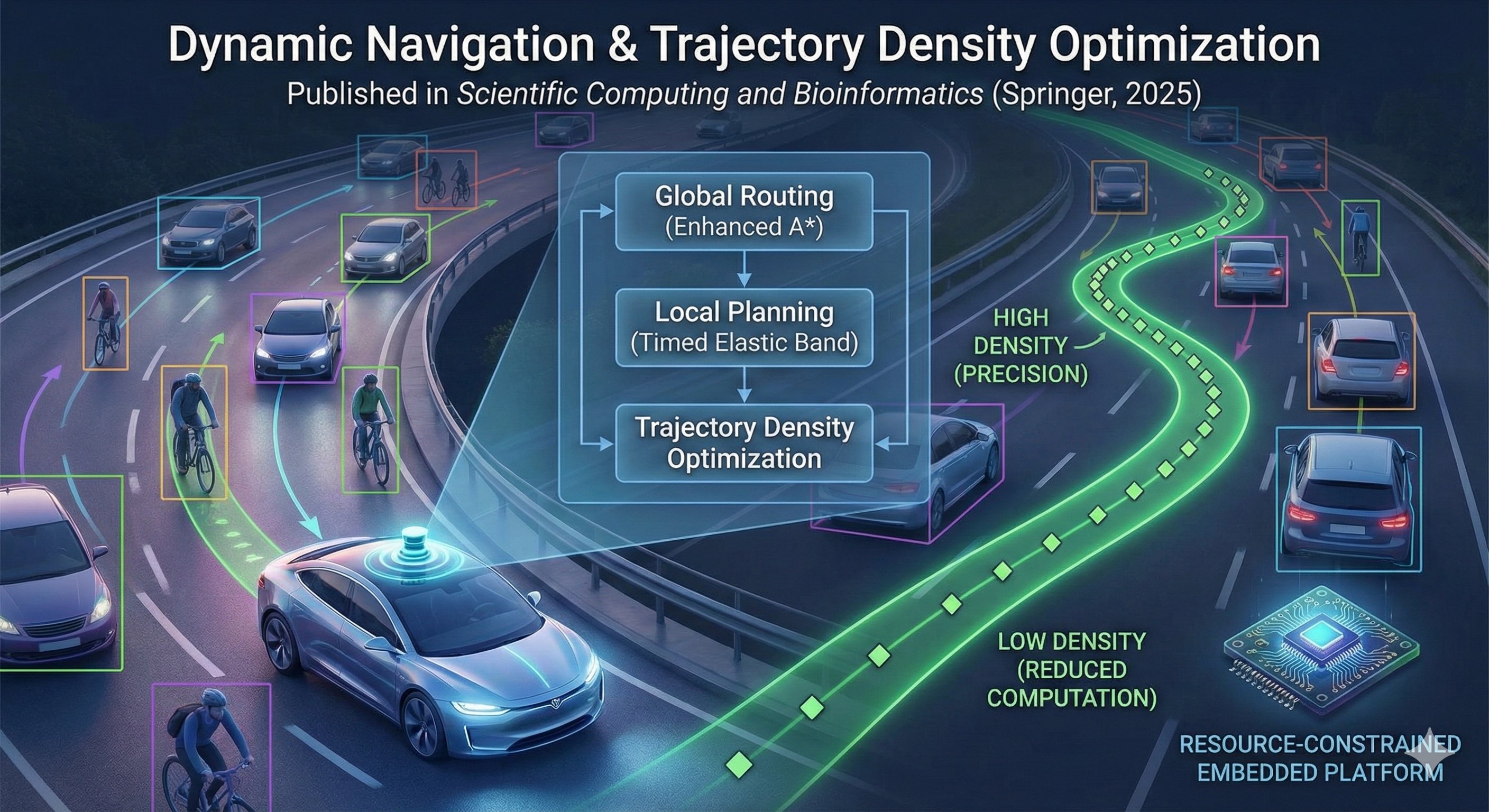
I designed a robust, hierarchical motion planning architecture adaptable to various vehicle types. By combining an enhanced A* algorithm for global routing with a Timed Elastic Band (TEB) approach for local planning, the system can dynamically react to moving threats while adhering to different motion models.
The core innovation of this work was a novel Trajectory Density optimization technique. Standard planners often waste computational resources by treating every meter of a path equally. My approach dynamically adjusts the number of waypoints—increasing density in curves for precision while reducing it in straight sections. This smart distribution significantly lowered the computational load, enabling complex, real-time trajectory execution even on resource-constrained embedded platforms.
(The photo above is generate by AI, obviously😉)
Published in Scientific Computing and Bioinformatics (Springer, 2025)
![[CVPR 2026] Teaching Robots to Build 3D Worlds Together](/3dgsStreet-thumb.webp)