
ABOUT ME

I am a Robotics Engineer specializing in autonomous systems, from perception to planning and control. My Ph.D. work focuses on building scalable 3D mapping and robust navigation solutions for autonomous vehicles.
My research philosophy is built on one core principle: theoretical concepts must be proven with hands-on application. I've been fortunate to work in advanced labs where I moved my ideas from theory to reality.
I have hands-on experience deploying code on full-scale autonomous vehicles, developing novel sensor fusion algorithms that reduced odometry error by 72%, and architecting a multi-robot mapping system that won a Best Paper Award.
I am a Mechatronics engineer with wide knowledge about different fields such as Electronics, Robotics, Control engineering, Computer science, Mechanics, and System engineering graduated from Amirkabir University of Technology.
I am a roboticist with a keen interest in Mobile Robots. Worked in the Mapping and Motion Planning area for mobile robots applications and introduced a novel approach for real-time motion planning in dynamic environments.
I am an Electronic Engineer with specialization in Embedded Real-Time Systems, highly experienced with computer coding for different types of microcontrollers in multiple languages including Assembly, C/C++.
PROJECTS
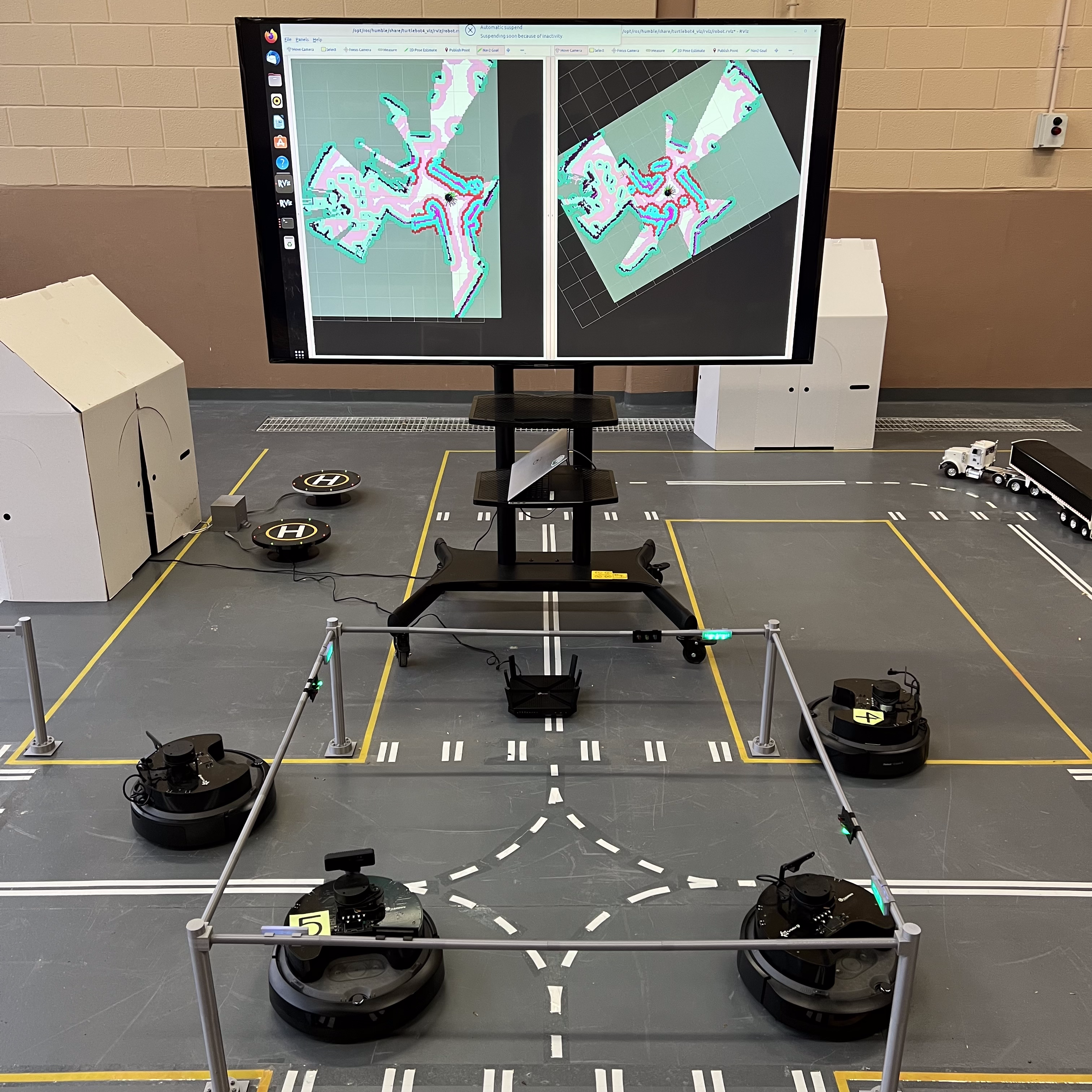
Multi-Robot Mapping & Navigation (🏆Best Paper Award)
A Holistic Approach for Collaborative Exploration

Motion Control for Autonomous Vehicle
Speed and Steering Controller for an autonomous cart
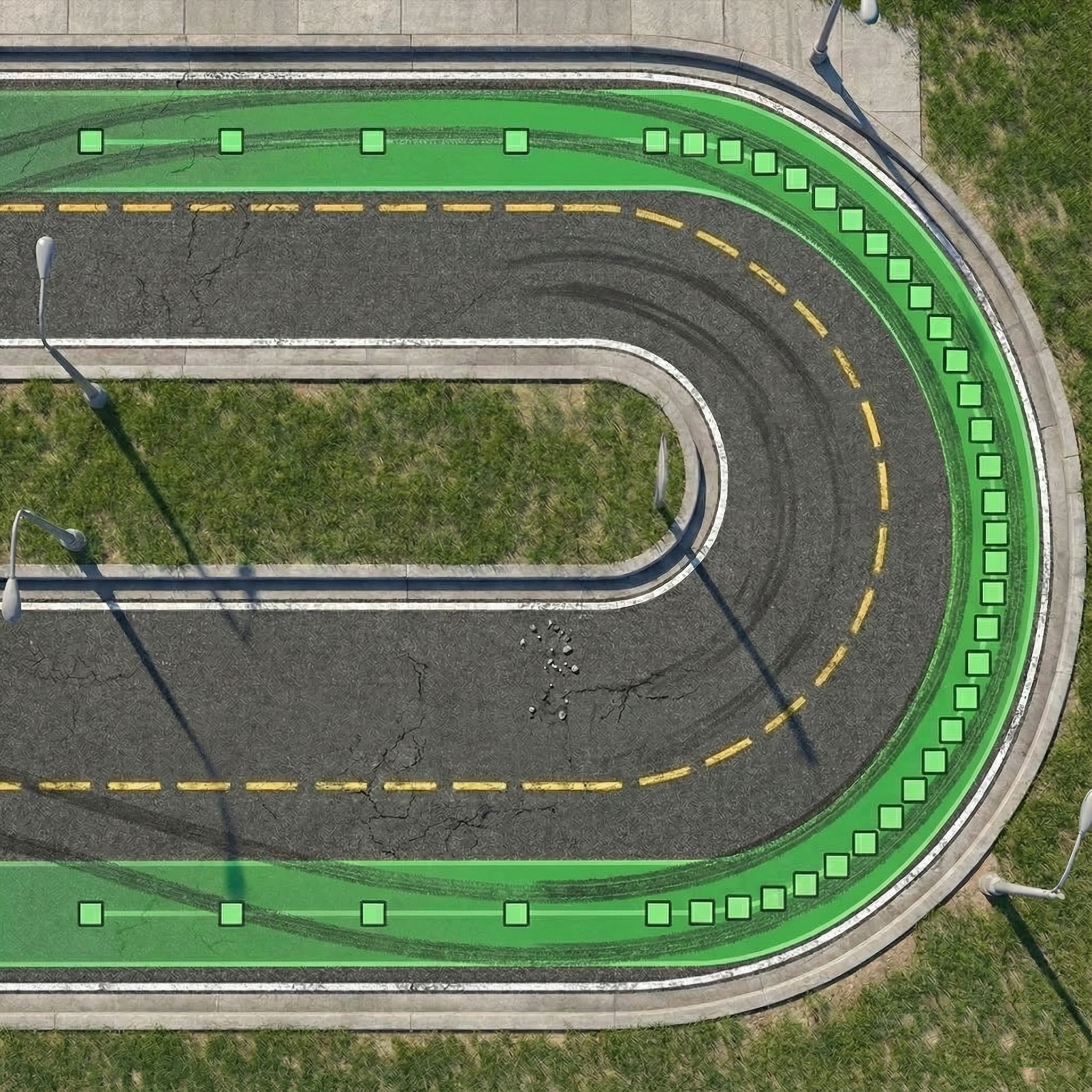
Motion Planning in Dynamic Environments
Developed a novel motion planning optimization technique that increased computational efficiency, enabling real-time trajectory execution on resource-constrained embedded platforms.

Multi-modal Odometry System
A hierarchical sensor fusion (LiDAR, Inertial, Wheel Encoders) algorithm that reduced trajectory error by 72%, directly improving navigational reliability and operational safety for mobile robots.

Robotic Manipulator Path Execution
Simulated Kinovarobotics manipulator in Gazebo and Controlled in ROS

Teaching Robots to Build 3D Worlds Together
A federated 3D Gaussian Splatting framework for decentralized multi-agent 3D reconstruction
TECHNICAL SKILLS
EDUCATION
Bachelor of Science: Electronics Engineering
Yazd University (2012 - 2016)
Master of Science: Mechatronics Engineering
Amirkabir University of Technology (AUT) (2016 - 2019) - Distinguished Graduate Award (Ranked 3rd of Class)
Doctor of Philosophy: Computer Science and Engineering
University of North Texas (UNT) Texas, USA (2022 - 2026)
INTERESTS

Robotics
Design, simulate, build robotic systems

Connected Autonomous Vehicles
Perception, Planning and Control for self-driving cars
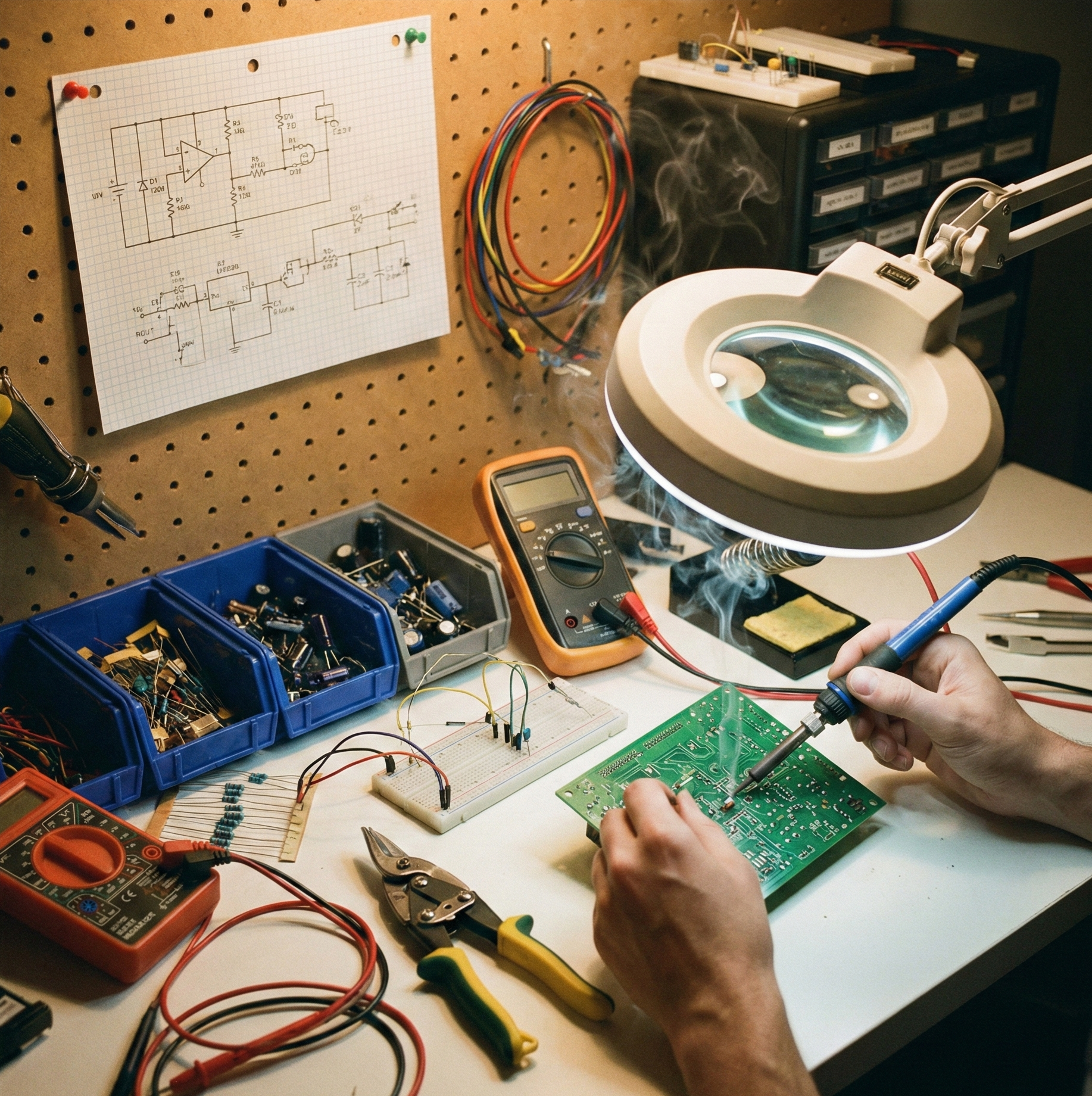
Electronics
Electronic circuits, Embedded systems, SCBs, etc.
